
T
Törölt tag
Guest
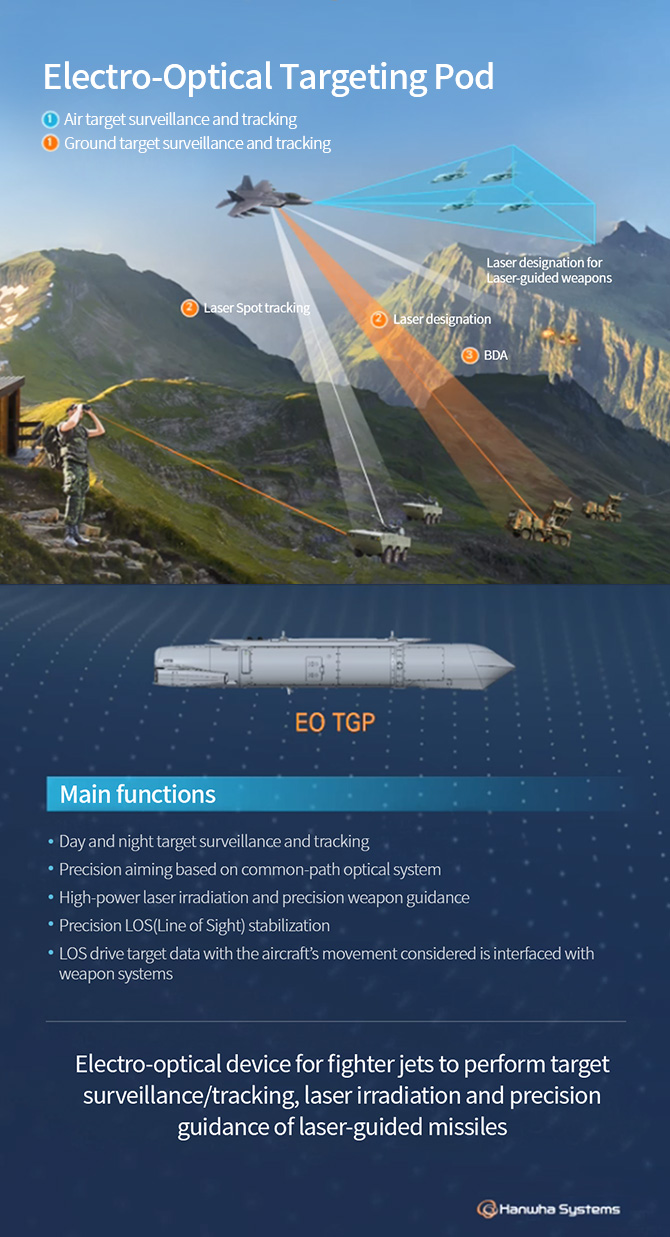
Az én értelmezésem szerint egy IRST és egy TGP között annyi a különbség hogy az IRST fixen be van építve a gépbe, nem foglal egy felfüggesztő pilont a gépen.Meg az IRST felszopása mellett elfelejteni, hogy nagy magasságba igaz, hogy csak egy célra egy időben, de egy mai TGP simán beazonosíthatóvá tesz egy vadászgépet 30-40 km-ről is, egy Szu-27/30/35 és egy F-15-él ez 40-50 km is lehet.
Persze, csak, ha nem blokkol felhő, stb. De a felboástban ez megy, csak ehhez persze kell radar kontaktus, amire ránézhet.
Az F-14 is ezt csinálta 50 éve a TCS-sel és az F-4E TISEO-val.
(kivételek természetesen erősítik a szabályt...)
Az elemzésébe a szerző azért hozta be az IRST azonosítást mert számos oka lehet annak hogy a radar NCTR funkciója nem működik megfelelően. Ő kiemelte az elektronikus zavarást mint egyik lehetséges okot.
Azt kevésbé taglalta hogy az IRST-TGP azonosítás akkor lehet az NCTR alternatívája ha tiszta, felhőtlen az idő, vagy felhős időben valamennyi szereplő a felhők fölött közlekedik.






")